Как пауки вдохновили учёных на создание новых шарнирных роботов
Команда учёных Института интеллектуальных систем Макса Планка в Германии и из Колорадского университета Боулдера в США использовала принцип работы суставов пауков для создания новых лёгких роботов. Об этом 16 июня сообщил портал Sciencedaily.com.
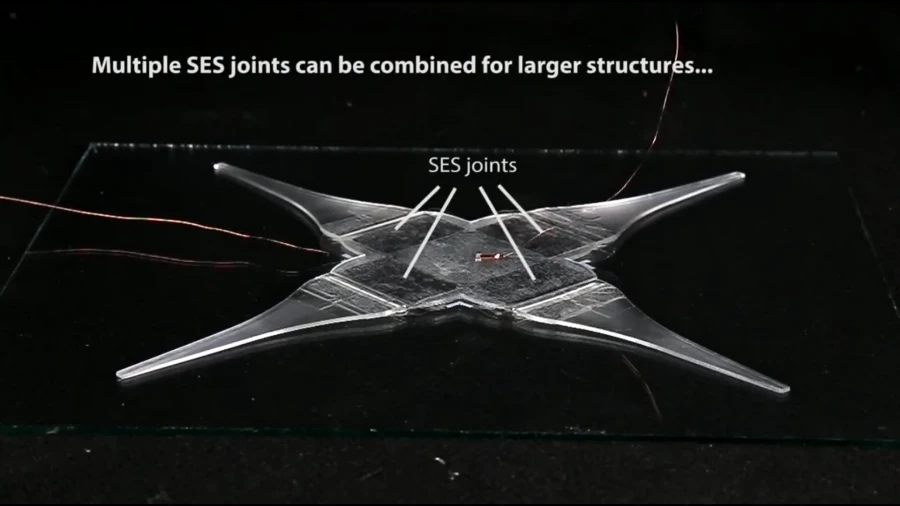
Принцип работы суставов пауков использован исследователями для управления новыми шарнирными роботами. Разработка призвана уменьшить вес робота и увеличить скорость его передвижения. Новая конструкция позволяет роботу прыгать на высоту, в 10 раз превышающую длину самого робота.
Высокая производительность обеспечивается за счёт электрогидравлических шарниров с мягким приводом. Учёные показали, что их конструкция легко захватывает хрупкие предметы с помощью двунаправленного сустава. Всё это делает новых роботов идеальными устройствами для многих современных роботизированных систем, где роботам необходимо быстро перемещаться и взаимодействовать с множеством различных сред.
Исследователи разработали суставы SES (Spider-inspired Electrohydraulic Soft-actuated joints) на основе более ранней технологии для создания искусственных мышц. Суставы SES имитируют экзоскелетный механизм пауков, состоящий как из жёстких, так и из более мягких элементов, которые действуют аналогично разгибанию ног насекомого за счёт использования гидравлических сил.
Конструкция выглядит следующим образом: это мешочек из тонкой пластиковой плёнки, наполненный жидким диэлектриком, например, растительным маслом. С каждой стороны мешочка помещаются электроды. Когда же между электродами подаётся высокое напряжение, электростатические силы заставляют жидкий диэлектрик перемещаться внутри мешочка, а само соединение изгибается. Новые "паукообразные" шарниры способны поворачиваться до 70°.
"Наши шарнирные соединения обеспечивают высокую функциональность и потребляют мало энергии, их легко и дёшево изготавливать — пластмассы, которые мы используем, предназначены для упаковки пищевых продуктов. Сами роботы могут перемещаться по-разному и манипулировать различными объектами, не ломая их", — говорит Кристоф Кеплингер (Christoph Keplinger), директор отдела робототехнических материалов Института интеллектуальных систем им. Макса Планка.
"Конечной целью нашего исследования было не создание робота-паука, — подчёркивает Филипп Ротемунд (Philipp Rothemund), второй автор публикации, — мы хотели разработать современный активный сустав, который можно использовать в любом типе роботов".
Учёные считают, что разработанные ими суставы будут особенно полезны для небольших роботизированных систем размером всего несколько сантиметров.
СПРАВКА MASHNEWS:
В последнее десятилетие в области робототехники наблюдается всплеск исследований, вдохновлённых теми или иными живыми организмами. Например, четырёхногий шагающий робот "Big Dog" от фирмы Boston Dynamic, созданный ещё в 2005 году. Или новый подводный робот, недавно представленный учёными Гарвардской школы инженерии, которые вдохновлялись косяками рыб.
