Созданы рыбы-роботы, способные к самоорганизации
Учёные создали рыб-роботов Bluebot, способных автономно двигаться и образовывать косяки под водой.
Косяки рыб демонстрируют сложное синхронизированное поведение, которое помогает им находить пищу, мигрировать и избегать нападений хищников. Рыбы сохраняют единство и синхронность действий во время перемещений, но ни одна рыба не координирует эти движения. Подобное коллективное поведение возникает из так называемой неявной координации: отдельные особи принимают решения, основываясь на том, что видят вокруг. Такой тип автономной самоорганизации давно привлекает учёных, особенно робототехников.
Группа исследователей из Гарвардской школы инженерии и прикладных наук им. Джона А. Полсона (Harvard John A. Paulson School of Engineering and Applied Sciences) и Института биологической инженерии Висса (Wyss Institute for Biologically Inspired Engineering) создала роботов-рыб, которые способны синхронизировать свои движения без какого-либо внешнего контроля. Это первый случай в истории робототехники, когда учёным удалось передать сложное коллективное поведение у подводных роботов.
"Мы часто помещаем роботов в условия опасные или недоступные для человека, где вмешательство учёных невозможно, – утверждает один из авторов статьи Флориан Берлингер (Florian Berlinger). – В подобных ситуациях выгодно иметь высоко автономных роботов. И мы смогли создать такую систему, функционирующую в условиях, где недоступны GPS и Wi-Fi ".
Попытки координировать движения роботов предпринимались и раньше (например, роботы-термиты, представленные учёными Гарвардского университета в 2014 году). Однако большинство предыдущих роботов такого типа действовало в двухмерном пространстве. Создать робота, который бы автономно перемещался в трёхмерных пространствах (воздухе и воде) до этого не удавалось.
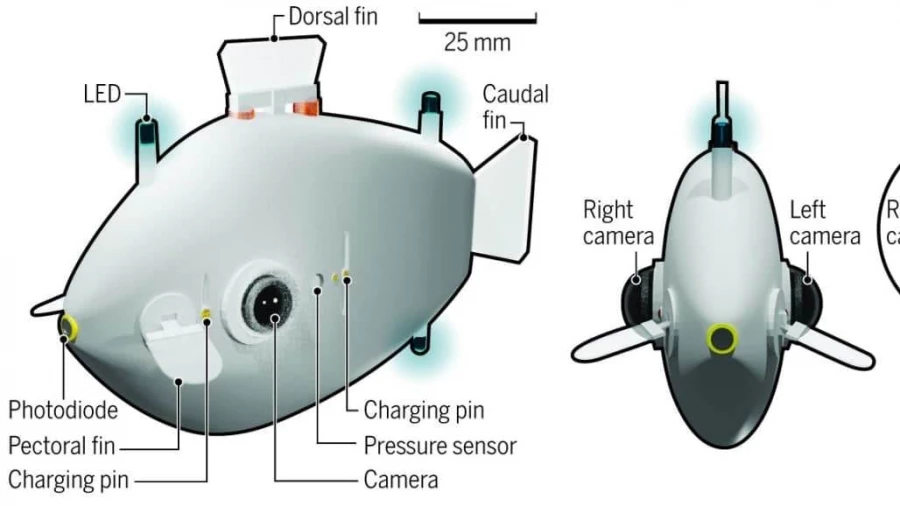
Каждый робот Bluebot оснащён двумя камерами и тремя светодиодными лампами. Боковые камеры с рыбьими линзами обнаруживают светодиоды соседних роботов и используют специальный алгоритм, позволяющий определить расстояние до них, направление движения соседних роботов и их курс. Роботы могут образовывать круг, объединяться в косяк и рассеиваться в водном пространстве по одному.
"Каждый Bluebot реагирует на положение соседнего робота в воде, – объясняет Берлингер. – Если мы хотим, чтобы роботы объединились в косяк, тогда каждый робот будет вычислять позицию своих соседей и двигаться в центр. Если же мы хотим, чтобы роботы рассеялись по одному, то Bluebot сделают обратную операцию. Когда мы хотим, чтобы рыбы-роботы плавали в виде круга, включаем режим следования за светодиодами соседей по часовой стрелке".
Роботы Bluebot также способны собираться вокруг сигнального робота.

Создание подобных роботов открывает массу перспектив. Рыб-роботов можно использовать для мониторинга экологической обстановки, для поиска различных объектов в хрупкой среде (как, например, в коралловых рифах). Исследование также прокладывает путь к лучшему пониманию поведения косяков рыб.
СПРАВКА MASHNEWS:
Это не первый случай в истории науки, когда учёные вдохновлялись поведением рыб. В ноябре 2020 года инженеры компании Nisan заявили, что робот Eporo, обеспечивающий безопасное движение автомобилей в группе, был разработан с оглядкой на синхронное движение косяка сардин. Для имитации движения рыб Eporo использует технологию сверхширокополосной связи и лазерный дальномер, которые выполняют функцию зрения и определения боковой линии соответственно.
