Учёные MIT научат роботов осязать
Американские учёные разработали новую методику, позволяющую роботам с высокой степенью точности оценивать позу и местоположение различных объектов.
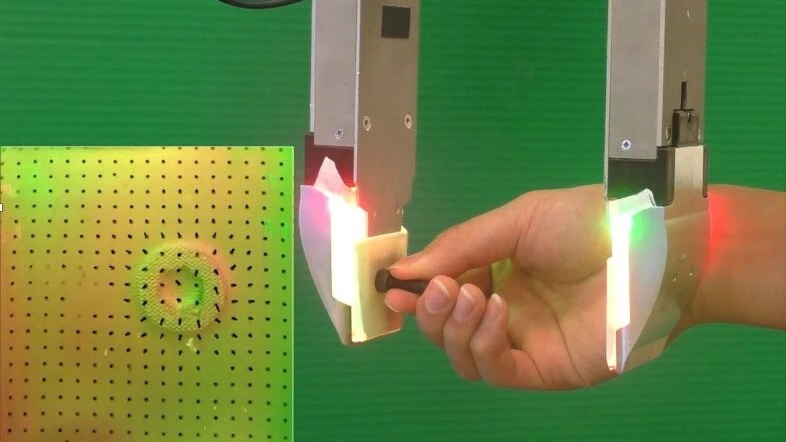
Изображение предоставлено исследовательницей MIT Марией Бауза
Учёные из Массачусетского технологического института (MIT) пытаются внедрить в роботов модель распознавания объектов, похожую на чувство осязания у человека. Это бы позволило машинам определить положение объекта, просто прикоснувшись к нему.
"Цель работы – продемонстрировать, что с помощью тактильного зондирования можно точно локализовать объекты, – заявила исследовательница Мария Бауза (Maria Bauza). – Наше открытие – это шаг вперёд по сравнению с предыдущими исследованиями тактильной локализации у роботов, мы полагаемся на более точные данные, не используя информацию, полученную через зрение или другие способы внешнего восприятия".
Первоначально исследователи разработали структуру, которая имитирует контакты между заданным объектом и тактильным датчиком, предполагая, что таким образом робот получит доступ к данным об объекте, с которым он взаимодействует (например, к данным о его трехмерной форме, свойствах и т. д.). Впоследствии Бауза и её коллеги использовали современные методы машинного обучения, чтобы сопоставить реальные тактильные наблюдения, собранные роботом, с набором контактов, созданных в процессе моделирования.
"Наш метод кодирует контакт, что значительно упрощает вычислительные затраты, обеспечивая выполнение всех операций в реальном времени", – утверждает исследовательница.
Разработанный метод на основе трёхмерной формы объекта позволяет моделировать контактную информацию. Вследствие чего не требуется никаких собранных заранее тактильных данных об объекте.
"В ходе исследований мы поняли, что тактильное восприятие даёт очень точные оценки позы, – объясняет Бауза. – Зрение часто бывает неточно, тактильное восприятие – никогда".
Поскольку многие объекты имеют схожие поверхности, с помощью разработанного метода можно предсказать распределение поз, а не только оценить отдельные положения объектов. Это выделяет данный способ работы роботов от ранее разработанных подходов, собиравших оценки только одной позы.
"Мы также заметили, что сочетание нескольких контактов одновременно, как при использовании нескольких пальцев, снижает любую неопределенность в позе объекта, – рассказывает Бауза. – Это подтверждает нашу гипотезу о том, что добавление контактов к объекту упрощает оценку местоположения и формы объекта".
Чтобы помочь людям в их повседневной деятельности, роботы должны уметь выполнять манипуляции точно и надёжно. Поскольку манипулирование объектами напрямую подразумевает прикосновение к ним, разработка эффективных методов, обеспечивающих тактильное восприятие у роботов, имеет ключевое значение.
Роботы, разработанные с помощью этой методики, сравнительно дёшевы, но способны обнаружить и заснять объект с высоким разрешением за счёт использования небольших камер, фиксирующих изменения сенсорной поверхности.
