Слушатель академии "Калашников" разработала перчатку тактильной связи с БПЛА
Обучающаяся проектного профиля "КосмоБио" академии "Калашников" Софья Кузнецова разработала прототип системы тактильной обратной связи для повышения эффективности пилотирования БПЛА. Пот \ьлм Себестоимость разработки в разы ниже стоимости зарубежных аналогов (4000 рублей против 1000 долларов). Наставником проекта выступила студентка Института естественных наук Удмуртского государственного университета Софья Абрамова.
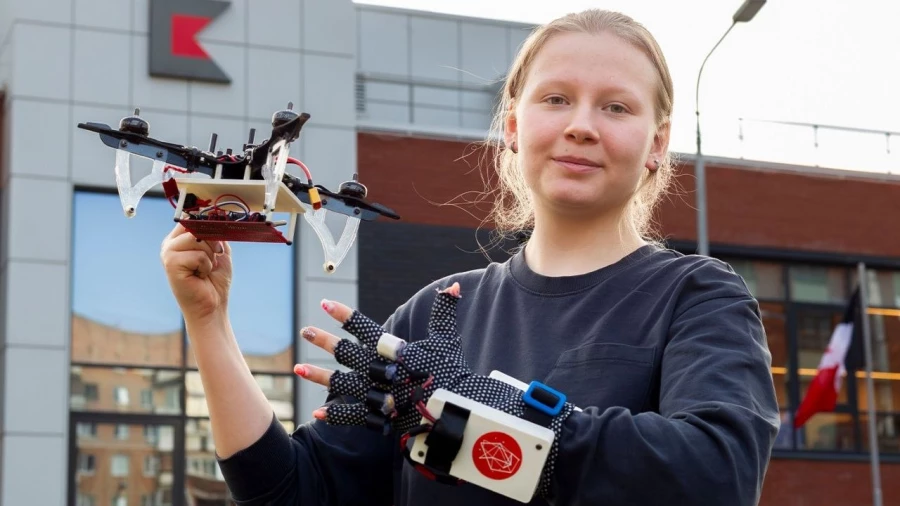
ИСТОЧНИК ФОТО: пресс-служба концерна "Калашников".
"Толчком к созданию устройства послужила проблема дефицита сенсорной информации, получаемой оператором БПЛА в ходе полёта, — говорится в сообщении. — При дистанционном управлении оператор лишается естественного контакта с пилотируемым устройством и окружающей его средой. Кроме того, визуальный и аудиальный каналы связи не всегда обеспечивают полную осведомленность, особенно в условиях ограниченной видимости, воздействия внешних факторов и необходимости оперативного реагирования на нештатные ситуации. Всё это приводит к ошибкам в пилотировании, росту аварийности и снижению эффективности применения беспилотных средств".
Отмечается, что тактильная обратная связь способна компенсировать эти ограничения, передавая критически важные данные через канал, менее подверженный информационной перегрузке. Разработанное Софьей устройство передает информацию о состоянии и поведении летательного аппарата на тактильный канал, что позволяет оператору получать данные интуитивно, непрерывно и без отвлечения внимания от визуального контроля полёта.
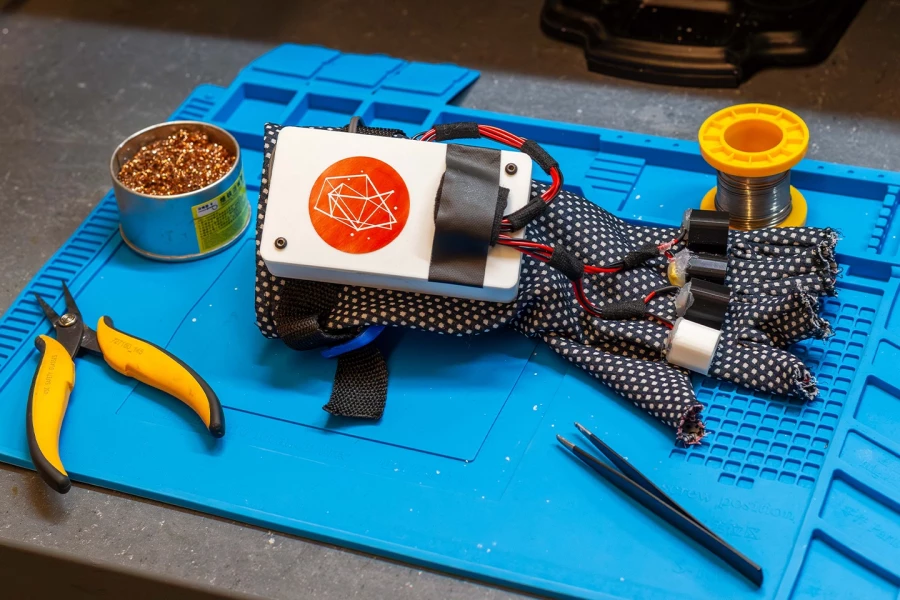
Система состоит из двух модулей. Один из них – передающий, устанавливается непосредственно на БПЛА, другой – принимающий, крепится на кисть руки оператора и соединяется с перчаткой, оснащенной вибромоторами.
Конструкция передающего модуля состоит из микроконтроллера Arduino Nano с загруженной в него программой сбора и передачи данных, собранных с помощью 6-осевого инерциального измерительного модуля, объединяющего в себе гироскоп и акселерометр. Передача данных ведется с помощью радиоканала на частоте от 433,4 МГц до 473 МГц. Питание модуля осуществляется непосредственно от БПЛА-носителя.
"Принимающее устройство имеет аналогичную структуру: радиомодуль для приема информации, а также микроконтроллер Arduino Nano с программой обработки данных. Ключевым элементом данной системы является перчатка с четырьмя вибромоторами, расположенными в один ряд на тыльной стороне ладони", — говорится в материале.
Принцип действия системы прост: при изменении крена влево или вправо от горизонта включается один из крайних виборомоторов, при изменении тангажа включается один из моторов, расположенных в середине ряда. Тем самым, оператор получает возможность «чувствовать» свою машину, словно он находится на ее борту.
Сегодня на рынке отсутствуют прямые аналоги данного проекта. Себестоимость прототипа, созданного Софьей, составляет около 4000 рублей за счет применения распространенных комплектующих, ПО с открытым исходным кодом и использования технологии 3D-печати.
По задумке проекта, система может найти широкое применение сразу в нескольких сферах:
- МЧС и поисково-спасательные отряды — для управления дронами при обследовании завалов, лесных пожаров или поиске людей, когда визуальный канал может быть перегружен или ограничен;
- Топливно-энергетический сектор — для инспекции ЛЭП, трубопроводов и высотных конструкций. Использование тактильного канала связи позволяет уменьшить риск столкновений, тем самым повышая безопасность работ;
- Спорт и учебные центры для операторов БПЛА — интеграция системы в тренажёры-симуляторы позволяет новичкам быстрее вырабатывать «мышечную память» и интуитивное понимание динамики полёта, что сокращает время обучения, а профессионалы получают возможность увеличить скорость реакции при управлении дроном на большой скорости;
«Эта разработка может войти в состав снаряжения операторов БПЛА, как мультироторного, так и самолётного типа. На наш взгляд, система хорошо подойдёт испытателям, ежедневно тестирующим беспилотники в сложных метеоусловиях, при воздействии средств РЭБ и в рамках выполнения нестандартных задач. Использование тактильного канала связи не только повысит уровень информированности оператора о поведении дрона, но и может стать ключом к совершенно новым методам пилотирования и эксплуатации беспилотных систем», — отмечает профессор кафедры «Мехатронные системы» ИжГТУ имени. М. Т. Калашникова Юрий Караваев.
ИСТОЧНИК ФОТО: пресс-служба концерна "Калашников".

